 A minimalism robotics blog
A minimalism robotics blogOne of the most useful things that you can do when developing a robotics stack is to compartmentalize your code into plugins. This is very useful when you need to write various implementations of a similar thing, and want to be able to build/include/use only the plugins we are interested in and/or switch between implementations at run-time. This allows you to be able to develop different implementations in parallel and save you time during compilation depending on the use case.
However I’ve found that most of the tutorials illustrate only the base cases where the plugins are built inside a single package (and are quite confusing: example). However this is eliminating a key feature of plugins – which is that you are able to develop independent implementations without having to compile all of the plugins.
The more proper usage case is illustrated as follows, where relevant plugins are packaged separately, allowing the possibility of separate compilation. This is the most helpful use case, when you design your code architecture for loading various planners, controllers, etc. This is a quick tutorial to showcase how to set up this architecture.
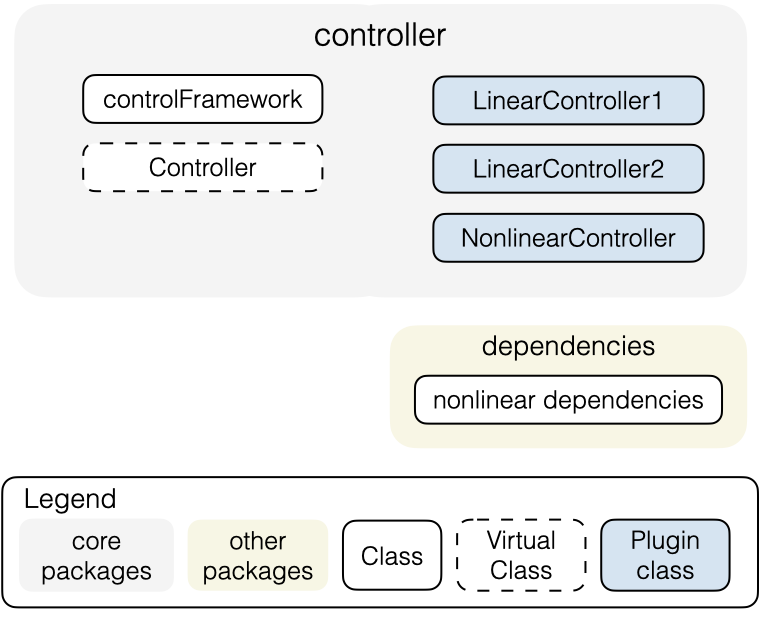
- Package configuration 1: If you want to have base class and plugin classes in the same package, follow the same steps here, except just put them all in one package (and add to the same
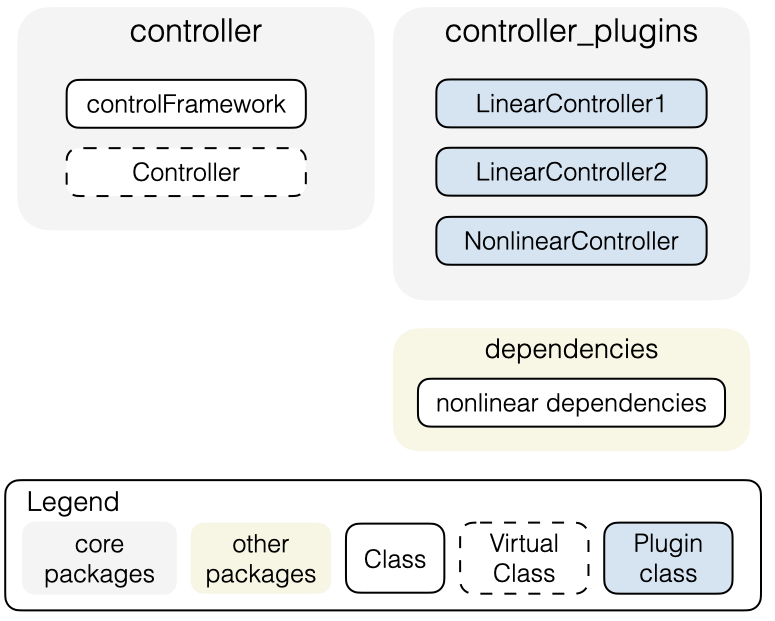
CMakeLists.txtandpackage.xmlas appropriate). - Package configuration 2: If you find it cumbersome to have multiple plugin packages, you can just put all of your plugins inside a single plugin package. In that case, ignore all the parts regarding
nonlinear_controller.
This tutorial requires basic understanding of ROS, writing CMakeLists.txt, and basic proficiency of C++ and virtual abstract classes.
Scenario
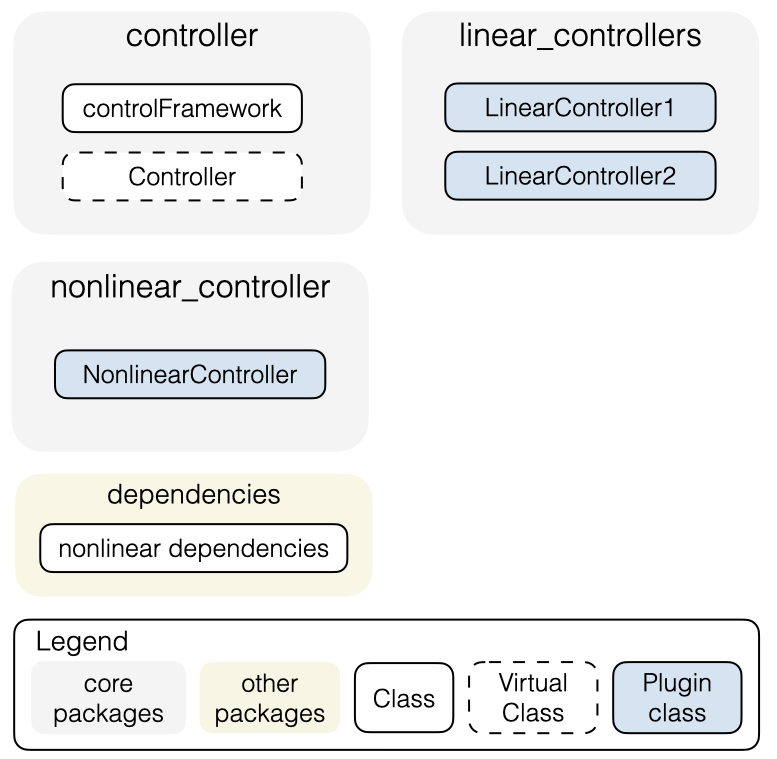
We’ll first describe the scenario in the package configuration 3 figure above.
Suppose that you have implemented a control framework, ControlFramework, which loads a chosen controller at runtime and applies the controller. The controller is to be chosen via a parameter at launch. Suppose you have 3 implementations to choose from: LinearController1, and LinearController2, and NonlinearController. All of these derive from a base virtual class that has the same function calls, however, just the algorithm that implements the function calls are different.
Suppose that NonlinearController has its own dependencies noninear_dependency that takes a long time to build… and on the days you only want to use one of the LinearControllers, you’d like to just ignore NonlinearController altogether, without having to worry about installing/compiling NonlinearController’s dependencies.
This scenario also allows multiple people to work on multiple implementations of the same base virtual class, without having to interfere with other people’s implementations.
Code layout
We will have have 4 pieces of code in this:
- A wrapper class,
ControlFramework, which loads the plugin at runtime depending on a parameter. - A virtual abstract base class,
Controller, which will contain virtual abstract functions thatControlFrameworkwill call at runtime. - The plugins
LinearController1,LinearController2, andNonlinearController, which will derive from base classController.
These will be placed into three packages:
controller, which contains the wrapper classControlFrameworkand the virtual abstract base classController.linear_controller, which contains pluginsLinearController1andLinearController2.nonlinear_controller, which contains the pluginNonlinearController.
Base class layout
To do this, we create a new virtual base class Controller.h in the package controller where we will call the plugins from, like so:
controller
├ config
├ include
│ └ controller
│ └ controlFramework.h
│ └ Controller.h
├ src
│ └ ControlFramework.cpp
├ CMakeLists.txt
└ package.xml
Plugin classes layout
These are pretty standard, but notice the addition of a plugins.xml. Their names doesn’t really matter, whatever you like as long as you are consistent:
linear_controller
├ config
├ include
│ └ linear_controller
│ └ LinearController1.h
│ └ LinearController2.h
├ src
│ └ LinearController1.cpp
│ └ LinearController2.cpp
├ CMakeLists.txt
├ package.xml
└ linear_controller_plugins.xml
nonlinear_controller
├ config
├ include
│ └ nonlinear_controller
│ └ NonlinearController.h
├ src
│ └ NonlinearController.cpp
├ CMakeLists.txt
├ package.xml
└ nonlinear_controller_plugins.xml
Creating the plugins
Base class
First, we will write the base class Controller and the plugins. Here, think about what you want your plugin to do. For example, we want all of the plugins to take in a current state, current input, and output the new input.
controller/include/controller/Controller.h
#pragma once
#include <ros/ros.h>
namespace control {
class Controller {
public:
Controller() {};
virtual ~Controller() {};
virtual bool initialize(const ros::NodeHandle& n,
const ros::NodeHandle& n_private) = 0;
virtual double computeFeedback(double x, double u) = 0;
};
} //namespace control
We’ve included an initialization function, as well as our computeFeedback function.
plugin packages
Now we write the derived classes. A very basic implementation is as follows:
linear_controller/include/linear_controller/LinearController1.h
#pragma once
#include <ros/ros.h>
#include <controller/Controller.h> // Inheriting the base class
namespace control {
class LinearController1 : public Controller {
public:
LinearController1() {}; // Constructor
// No destructor!
bool initialize(const ros::NodeHandle& n,
const ros::NodeHandle& n_private);
double computeFeedback(double x, double u);
private:
// More stuff...
};
}
linear_controller/src/LinearController1.cpp
#include <linear_controller/LinearController1.h>
#include <pluginlib/class_list_macros.h> // Note, you must include this line
namespace control {
bool LinearController1::initialize(const ros::NodeHandle& n,
const ros::NodeHandle& n_private)
{
// do stuff here!
return true;
}
double LinearController1::computeFeedback(double x, double u)
{
// do stuff here!
return 0.0;
}
}
PLUGINLIB_EXPORT_CLASS(control::LinearController1, control::Controller)
Note that in the cpp file, we added #include <pluginlib/class_list_macros.h>. We also need to add the last line to the file:
PLUGINLIB_EXPORT_CLASS(namespace::PluginClassName, namespace::DerivedClassName), which registers classes as plugins.
Now do the same for LinearController2 and NonlinearController!
Building and exporting the plugins
Okay, now we have to write the CMakeLists.txt, package.xml, and the plugin.xml’s for these packages. Because these files are different packages, we’re going to compile them as separate libraries and add them to the pluginlib manifest.
Building the plugins
We first write the CMakeLists.txt for the plugin packages.
For package linear_controller, we add both LinearController1 and LinearController2 to the library that we compile, which is called linear_controller:
linear_controller/CMakeLists.txt
...
include_directories(include
${catkin_INCLUDE_DIRS}
)
add_library(linear_controller # <-- the library name!
src/LinearController1.cpp
src/LinearController2.cpp
)
add_dependencies(linear_controller ${catkin_EXPORTED_TARGETS})
target_link_libraries(linear_controller ${catkin_LIBRARIES} )
install(TARGETS linear_controller
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
)
And similarly for nonlinear_controller. Remember, the whole reason that we wanted separate packages for plugins is because we want to be able to compile only the plugins we are interested in. Here, nonlinear_controller has the dependency nonlinear_dependency. If we’re only working with linear_controller, we want to not have to compile nonlinear_controller and it’s dependencies if we wanted to.
nonlinear_controller/CMakeLists.txt
...
find_package(catkin REQUIRED COMPONENTS
nonlinear_dependency # dependencies only to nonlinear
)
catkin_package(
INCLUDE_DIRS include
LIBRARIES ${PROJECT_NAME}
CATKIN_DEPENDS
nonlinear_dependency # dependencies only to nonlinear
DEPENDS
)
...
include_directories(include
${catkin_INCLUDE_DIRS}
)
add_library(nonlinear_controller # <-- the library name!
src/NonlinearController.cpp
)
add_dependencies(nonlinear_controller ${catkin_EXPORTED_TARGETS})
target_link_libraries(nonlinear_controller ${catkin_LIBRARIES} )
install(TARGETS nonlinear_controller
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
)
Write the Plugin XML file
For each package, we have to write a plugin xml. The plugin xml should declare all of the plugins contained in that package. For linear_controller, this should look like:
linear_controller/linear_controller_plugins.xml
<library path="lib/liblinear_controller">
<class type="control::LinearController1" base_class_type="control::Controller">
<description>LinearController1 for control</description>
</class>
<class type="control::LinearController2" base_class_type="control::Controller">
<description>LinearController2 for control</description>
</class>
</library>
here, we have 2 plugin classes declared inside this library. Note that the library path, lib/liblibrary_name should match the library name that you’ve specified in the CMakeLists.txt.
If you’ve compiled a separate library inside this package (So you have two libraries that you’ve specified in CMakeLists.txt), you may append to this xml like such:
linear_controller/linear_controller_plugins.xml
<library path="lib/liblinear_controller">
<class type="control::LinearController1" base_class_type="control::Controller">
<description>LinearController1 for control</description>
</class>
<class type="control::LinearController2" base_class_type="control::Controller">
<description>LinearController2 for control</description>
</class>
</library>
<!-- plugins in a separate library that you've compiled in CMakeLists.txt -->
<library path="lib/libanother_linear_controller">
<class type="control::AnotherLinearController" base_class_type="control::Controller">
<description>AnotherLinearController for control</description>
</class>
</library>
similarly:
nonlinear_controller/nonlinear_controller_plugins.xml
<library path="lib/libnonlinear_controller">
<class type="control::NonlinearController" base_class_type="control::Controller">
<description>NonlinearController for control</description>
</class>
</library>
Export the plugins to ROS
Now, with the plugins.xml manifests set, we venture to package.xml to make the plugins visible to the ROS toolchain with the export tag
linear_controller/package.xml
<package>
...
<export>
<controller plugin="${prefix}/linear_controller_plugins.xml" />
</export>
</package>
base_class_package_name plugin="${prefix}/{plugins_filename}.xml"
base_class_package_name is the package where the base class of the plugin is located! In our case, this will be package controller which contains the Controller.h virtual abstract class that we have derived the plugins from.
Similarly for nonlinear_controller:
nonlinear_controller/package.xml
<package>
...
<export>
<controller plugin="${prefix}/nonlinear_controller_plugins.xml" />
</export>
</package>
Check build/export
After you’ve built and exported your code, you can already check if you were successful! Open a terminal, and use
rospack plugins --attrib=plugin controller
You should see something like..
controller /path/to/linear_controller_plugins.xml
controller /path/to/nonlinear_controller_plugins.xml
Using the plugins
Now comes the fun part! we will use the plugins in ControlFramework.
We first add the appropriate headers to ControlFramework.h:
controller/include/controller/ControlFramework.h
#pragma once
#include <ros/ros.h>
#include <pluginlib/class_loader.h> // Allows us to load plugins
#include <controller/Controller.h> // The header file for the base class
namespace control {
class ControlFramework {
public:
ControlFramework();
~ControlFramework();
bool initialize(const ros::NodeHandle& n,
const ros::NodeHandle& n_private);
// More stuff...
private:
// We'll create a flag whether it is linear or nonlinear:
enum ControlMethod { LINEAR1, LINEAR2, NONLINEAR };
// Here, we have to maintain a plugin loader for the entire duration of the program
std::unique_ptr<pluginlib::ClassLoader<controller::Controller>> controller_plugin_loader_ptr_;
// And this is the pointer to the controller
boost::shared_ptr<Controller> controller_;
// More stuff...
};
} // namespace control
and lastly, to use:
controller/src/ControlFramework.cpp
#include <controller/ControlFramework.h>
namespace control {
bool ControlFramework::initialize(const ros::NodeHandle& n,
const ros::NodeHandle& n_private)
{
// stuff ...
// Load the plugin loader: The syntax here is:
// std::make_unique<pluginlib::ClassLoader<namespace::base_class_name>>
// ("base_class_package_name", "namespace::base_class_name");
controller_plugin_loader_ptr_ = std::make_unique<pluginlib::ClassLoader<controller::Controller>>
("control", "control::Controller");
// Here we're going to switch which controller depending on the method chosen
// by a parameter, 'method'.
if (method == ControlMethod.LINEAR1)
{
controller_ = controller_plugin_loader_ptr_->createInstance("control::LinearController1");
} else if (method == ControlMethod.LINEAR2)
{
controller_ = controller_plugin_loader_ptr_->createInstance("control::LinearController2");
} else if (method == ControlMethod.NONLINEAR)
{
controller_ = controller_plugin_loader_ptr_->createInstance("control::NonlinearController");
}
// And as we've added an initialization function to allow initialization of
// specific methods for each specific controller
controller_->initialize(n, n_private);
}
// More stuff...
private:
// Here, we have to maintain a plugin loader for the entire duration of the program
std::unique_ptr<pluginlib::ClassLoader<controller::Controller>> controller_plugin_loader_ptr_;
// And this is the pointer to the controller
boost::shared_ptr<Controller> controller_;
// More stuff...
};
} // namespace control
And voila! You can now use controller_ as a normal pointer to your controller and use it as normal.
...createInstance("control::CLASS_NAME_HERE")... ! Feel free to do so if you are able to make sure that your class names are consistent.